로봇물고기 개발 발자취
전자신문 | 입력 2010.02.01 10:29
[쇼핑저널 버즈] 지난해 말 이명박 대통령이 '국민과의 대화'라는 제목의 TV 프로그램에 출연, 일명 "로봇 물고기" 파문을 불러일으킴으로써 로봇 물고기는 그다지 명예롭지만은 않은 스타덤에 올라 인구에 회자되기도 했다.
미국, 일본, 영국 등지에서 산업, 엔터테인먼트, 군사용 등 다양한 목적으로 10여 년 전부터 연구를 진행해 온 로봇 물고기는 21세기 들어 여러 연구성과를 보이고 있으며 향후 실제 강이나 바다에서의 운용을 목적으로 지속적인 연구가 시행되고 있다.
세계 최고의 수영선수 "물고기"는 지난 1억 6천만년 가량을 수중환경에 가장 적합한 최상의 몸체를 만들어 왔다. 물 속에서의 기동성과 효율성에 있어 타의 추종을 불허하는 물고기를 따라잡는 작업이 세계의 로봇업계에서 다양한 방식으로 추진되고 있다.
 |
 |
 |
 |
효율성: 물고기는 물 속에서의 효율적인 이동을 위해 자신들의 몸을 변형, 진화시켜 왔다. 그것의 결과물로 물 속에서의 순간 가속 능력이 생겨났다.
기동성: 물고기는 이동 중 속도를 늦추지 않아도 180도 회전이 순간적으로 가능하다. 반면 잠수함이 이동 중 180도 회전을 하기 위해선 절반으로 속도를 늦추며 잠수함 본체의 10배 이상의 거리를 더 이동해야 한다.
이러한 물고기의 습성을 모방한 로봇 시스템의 구현은 진정한 도전이며 물고기의 생체역학, 유체역학에 대한 보다 많은 지식과 이해가 요구된다.
■ 로보튜너 / RoboTuna (미국 MIT)
로보튜너(RoboTuna) 프로젝트는 1993년, 미 해군의 요청에 의해 미 해양공학국(Department of Ocean Engineering) 연구팀이 물 속에서 자율적으로 움직이는 수중 자동차의 추진력을 개선하는 과정에서 시작됐다. 이때 개발 모델로 선택된 것이 바로 참치다.
 |
로보튜너 프로젝트는 그로부터 2년 뒤 MIT로 이관되었고 수족관 안에서 로봇 몸체와 컨트롤러를 잇는 돛대 모양의 연결 부위를 통해 센서가 정보를 입력 받고 컨트롤러가 로봇에게 지시를 내리는 방식으로 연구가 진행됐다.
 |
이후 MIT에서는 창꼬치를 모방한 로보파이크(RoboPike)을 설계하는데 로보파이크는 로보튜너와 같은 도르래 시스템이 아닌 물속에서의 유영이 가능하다는 차이점을 지닌다. 하지만 완전히 자율적으로 움직이는 로봇의 개념은 아니었으며 인간의 지시와 명령을 따르는 컴퓨터와 같은 수준이었다.
■ PPF - 04 (일본 NMRI)
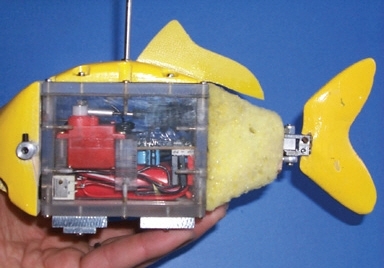
일본국립해양연구원(NMRI)에서는 미래의 보트와 잠수함에 적용시킬 기술 개발을 목적으로 로봇 물고기에 대한 다양한 프로젝트들을 시도해왔다. 그 중 PPF-04는 리모트 컨트롤 방식의 길이 19cm, 무게 400g의 소형 로봇 물고기로 이는 꼬리지느러미의 진동 폭과 속도와의 연관성을 밝히는 성과를 거두게 된다.
 |
일본 미쓰비시 조선소의 자회사인 료메이(Ryomei) 엔지니어링에서는 수족관용으로 "실러캔스"라는 물고기를 로봇으로 제작했다.
실러캔스는 고대에서부터 번식한 물고기로 일명 '살아있는 화석'으로 불린다. 백악기에 멸종한 것으로 알려져 왔으나 1938년 남아프리카의 이스트런던 동해안의 칼룸나강 앞바다에서 발견된 후, 1952년를 전후로 아프리카 동해안의 코모로 제도에서 약 200마리가 포획되었다.
 |
실러캔스 로봇은 전적으로 컴퓨터에 의해 전선이 없이도 통신을 통해 제어되며 방문자가 실러캔스의 작동 모습을 보기 원하면 버튼을 눌러야 한다.
■ SPC-03 로봇 물고기 / Robotic fish SPC-03 (중국)
물고기의 움직임을 닮은 SPC?03은 안정적인 원격 기술에 의해 제어된다. 이는 수중 고고학 탐사를 위해 최대 시속 4km로 2-3시간 동안 작동될 수 있도록 제작됐으며, 수중에서의 사진촬영과 작은 물체의 운반이 가능한 SPC?03은 수년간의 연구 결과, 2004 년 8 월 시험 운행됐다. SPC-03이 개발된 배경은 조금 독특하다.
 |
그 중 일부는 발견되기도 했으나 중국 당국은 이 지역에 대한 탐사가 계속되기를 원했다. SPC-03 로봇 물고기는 이후 6시간 동안 4천 평방미터에 이르는 지역을 촬영한 사진을 전송하며 탐사를 할 수 있도록 발전되었다.
■ 박시봇 / Boxybot (스위스 BIRG)
스위스 BIRG(Biologically Inspired Robotics Group: 생물학 로보틱스 그룹)에서 시작한 박시봇 프로젝트는 물 속에서 자율적으로 움직이는 로봇의 실현을 위해 추진됐다. 연구팀은 물고기의 모양새와 지느러미의 쓰임새가 매우 다양하다는 점에 주목, 이를 집중적으로 연구한다.
 |
■ 에식스 로봇 물고기 / Essex Robotic Fish (영국 Essex대학)
에식스 대학 연구팀의 목표는 어떻게 하면 로봇 물고기가 진짜 물고기와 같이 자율적으로 물 속을 이동할 수 있을까에 초점이 맞춰졌다. 기간에도 있어 왔던 많은 시도들과 다른 점은 이들이 속도, 회전, 가속, 정지 등 물고기의 다양한 활동 방식과 특성을 로봇에 모두 옮겨 적용시키려는 도전을 했다는데 있다.
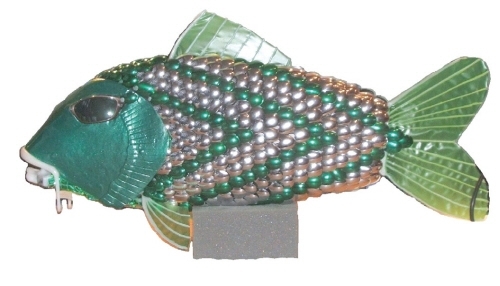 |
■ 로봇 잉어 / Robotic koi (일본 Ryomei 엔지니어링)
앞서 소개한 "미쓰비시 애니메트로닉스' 시리즈를 개발한 미쓰비시 조선소의 자회사 료메이 엔지니어링이 개발, 2006년 3월에 발표한 로봇 잉어. 잉어가 로봇 물고기의 또 다른 컨셉으로 선택된 이유는 일본에서는 잉어가 힘과 기회의 상징이기 때문이었다.
 |
■ 제씨코 / Jessiko (프랑스 ROBOTSWIM)
제씨코는 2007년 5월에 열린 유로봇(European Robotics Cup) 컨퍼런스에서 처음 선을 보였다. 길이 17cm, 무게 80g의 이 작은 로봇 물고기는 이후 로봇스윔이라는 회사를 설립하게 되는 프랑스인 엔지니어 크리스토프 티라비가 개발한 것으로 다른 로봇 물고기와 직접 커뮤니케이션을 교신할 수 있도록 디자인됐다. 제조원가가 저렴한 덕분에 학교 교육과 이벤트 등에 사용되고 있다.
 |
미국 워싱턴대학에서 개발한 로보피쉬는 길이 0.5m 무게 3kg으로, 높은 유연성과 가슴지느러미 의 반전을 통한 후진기능을 지니고 있다. 라디오 시그널은 염분이 있는 바닷물에서는 매우 불안정하기 때문에 연구팀은 로봇 물고기끼리 바다에서의 교신을 가능케 함으로써 같은 방향으로 이동하거나 보다 넓은 지역으로 산개할 수 있는 기술을 개발하고자 했다.
 |
■ 타이-로봇-쿤 / Tai-robot-kun (일본 키타큐슈 대학)
일본 키타큐슈 대학의 엔지니어들은 세계에서 물고기와 가장 유사한 형태로 꼽히는 생물모방공학형(biomimetic) 로봇 물고기를 개발했다. 이 붉은 도미 모양의 로봇 물고기는 "타이-로봇-쿤(Tai-robot-kun)"이란 이름으로 잘 알려져 있으며, 7kg의 무게를 지니고 있다.
 |
■ 아쿠아 펭귄 / Aqua penguin (독일 Festo)
하노버메쎄 2009에서 개막식 최대의 하이라이트로 소개된 아쿠아 펭귄은 독일의 생체 로봇 제작회사 '훼스토(Festo)'가 개발, 제작했다. 수년간 펭귄의 모든 동작과 움직임을 연구한 끝에 유공압 기술 노하우를 통해 완성, 발표된 이 바이오닉 펭귄은 실제 펭귄 크기에 유선형 몸을 가지고 있다.
 |
'관심 사 > 잡다한 것' 카테고리의 다른 글
| 인간을 위한 로봇을 꿈꾸다 (0) | 2010.02.01 |
|---|---|
| 네덜란드 로봇공학 현주소를 짚어보다 (0) | 2010.02.01 |
| 세계에서 가장 아이큐가 높은 나라 (0) | 2010.01.31 |
| UFO 구름, 외계 우주선? (0) | 2010.01.31 |
| 시조새보다 앞선 새 모양 공룡 발견 (0) | 2010.01.30 |